
When a rifle is fired there is recoil (that is the action) to account for that AMBAC could move a binder slightly or engage a vernier for a slight moment to keep the MS in place (the reaction).
Every time the pilot moves one of the limbs on an MS it will result in a moment of inertia (the action, think of a applying a force at a tangent to a wheel), the AMBAC will make an identical moment of inertia in the opposite direction (reaction) to effectively balance the MS.
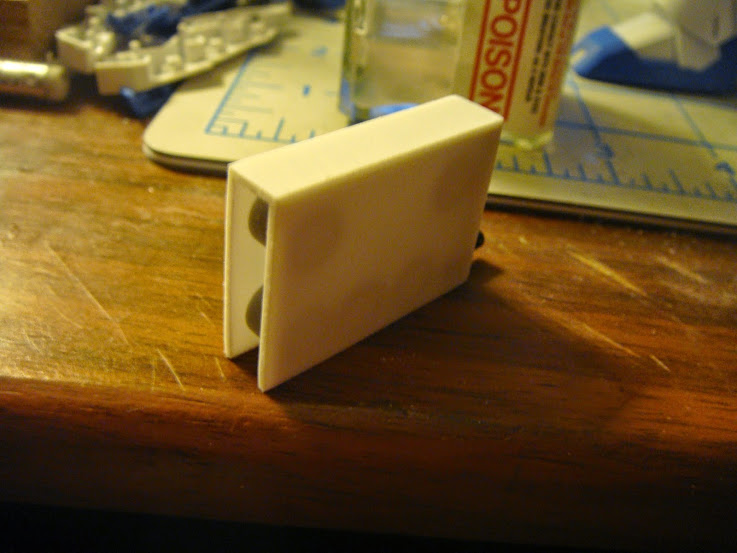
So here is what I have come up with, based loosely on Hazel II's Tri-Booster configuration, which allows the boosters to be moved quite freely. In addition to the purge-able single fixed Shield Booster and the moveable fuel pods.
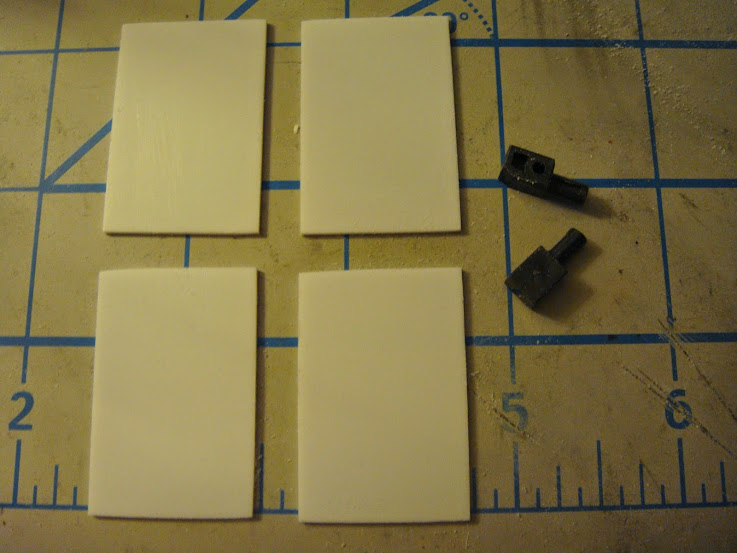
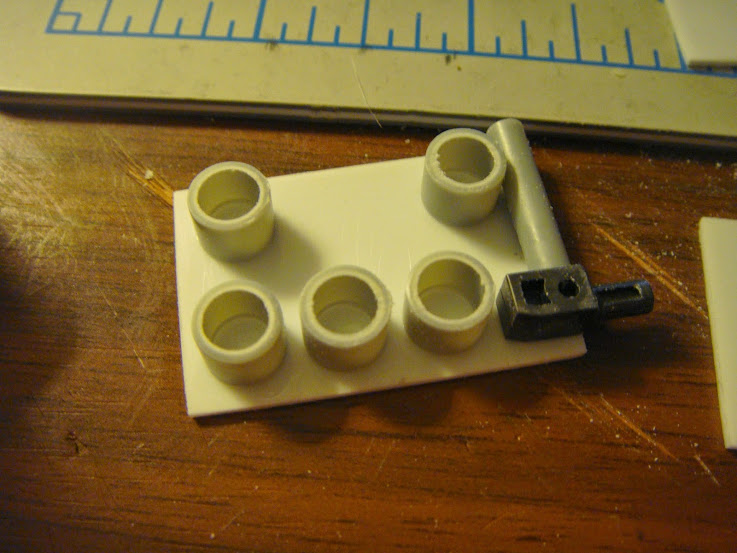
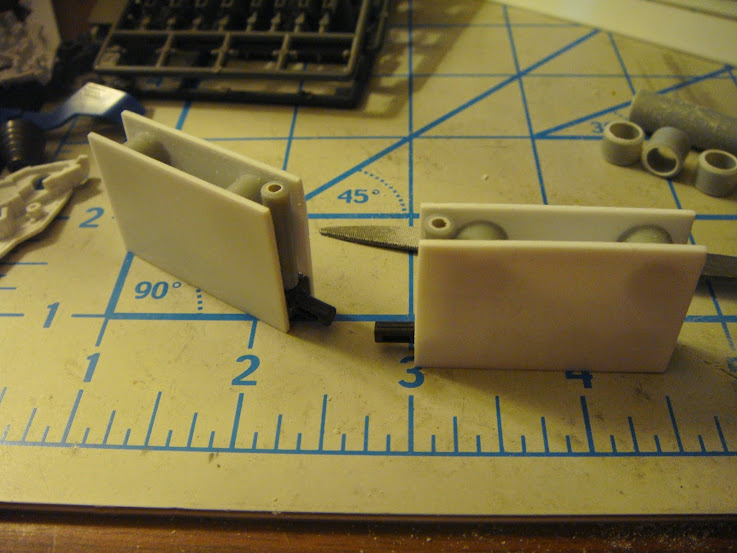
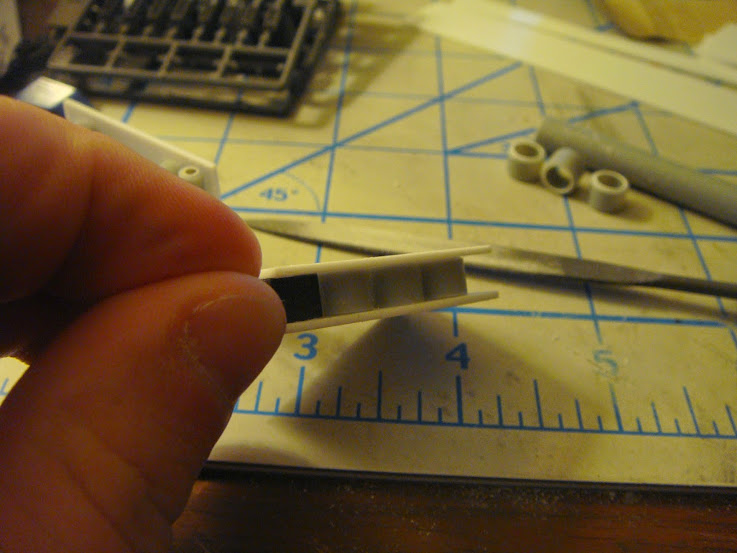
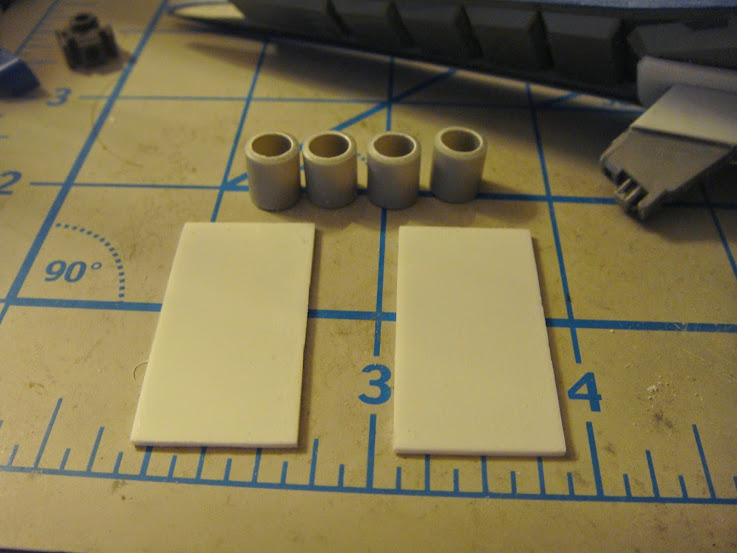
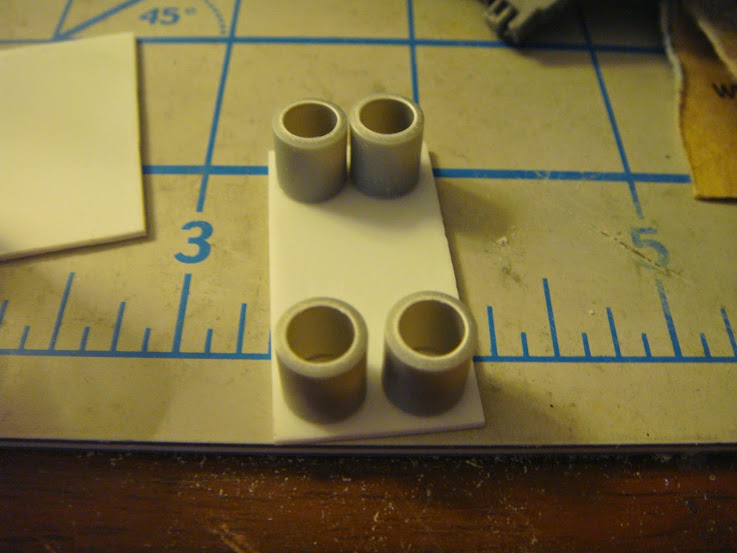
For some reason I've gotten bored with standard vernier setups and decided to venture into something a little more unique in appearance and functionality, I based these loosely on SCRAM jets with an open combustion chamber and no obvious vernier bells.
Universal Boosters 1 & 2



Shield Booster

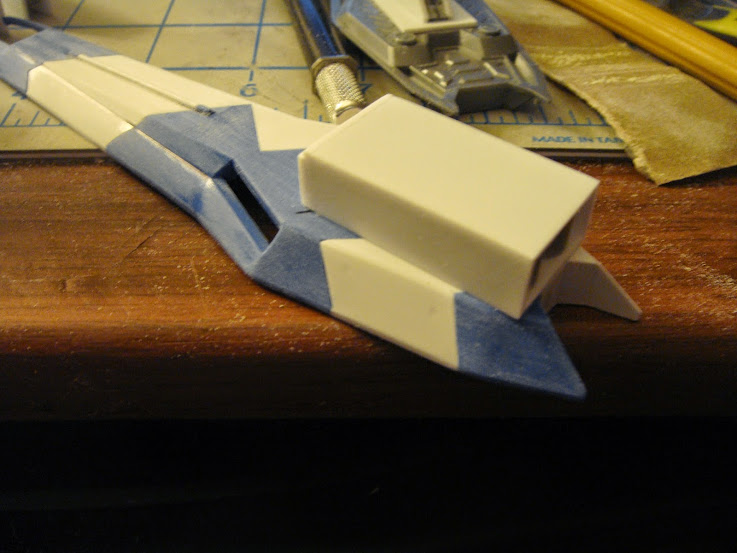

It is all extremely rough looking blocky chunks right now, I'll be working on it some more in the future as well.
The conversation at Gundam Eclipse has inspired me to build a few more systems rooted thoroughly in real world physics, which will all be very fun to explain.
No comments:
Post a Comment